Come tutti sappiamo, dal punto di vista strutturale, i motori passo-passo possono essere suddivisi in molti tipi diversi come motori a reazione, motori a magneti permanenti e motori ibridi. Dal punto di vista dei metodi di controllo, possono essere suddivisi in controllo ad anello aperto sistemi e sistemi di controllo a circuito chiuso Esistono diversi tipi di sistemi di controllo e sistemi di controllo a circuito semichiuso. A giudicare da questi diversi tipi di motori, tutti presentano alcuni vantaggi e svantaggi, come ad esempio:
Motore passo-passo reattivo: poiché lo statore ha avvolgimenti e il rotore è realizzato con materiali magnetici morbidi, questo motore passo-passo presenta i vantaggi di una struttura semplice, basso costo e angolo di passo ridotto, ma ha anche scarse prestazioni dinamiche ed efficienza la bassa temperatura e l’elevata generazione di calore rendono difficile garantire l’affidabilità.
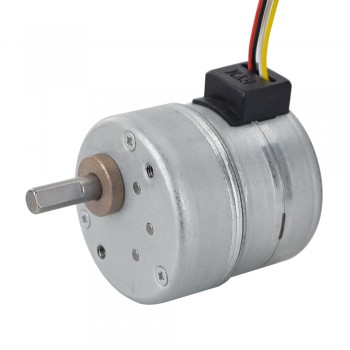
Motore passo-passo a magnete permanente: il rotore del motore passo-passo a magnete permanente è realizzato in materiale a magnete permanente. Il numero di poli del rotore è uguale al numero di poli dello statore, quindi presenta i due vantaggi di buone prestazioni dinamiche e. coppia di uscita elevata, tuttavia, questo tipo di motore presenta anche svantaggi quali scarsa precisione e ampio angolo di passo.
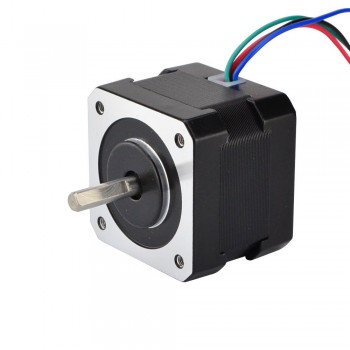
Motore passo-passo ibrido: in termini di vantaggi, questo tipo di motore passo-passo è una combinazione di motori reattivi e a magneti permanenti che combinano molti vantaggi di entrambi. Ha una coppia di uscita elevata e buone prestazioni dinamiche e anche l’angolo di passo è relativamente piccolo , ma la struttura del motore è relativamente complessa, il che ne rende difficile la fabbricazione e richiede costi di produzione relativamente elevati.
In sintesi, quando si seleziona un motore passo-passo, è necessario determinare il tipo di motore più adatto in base ai requisiti applicativi specifici, come requisiti di precisione, intervallo di velocità, limiti di rumore e vibrazioni, ecc.
Articoli correlati: https://blog.libero.it/wp/2024oyotepperde/2024/09/07/die-rolle-zwischen-servomotor-und-treiber/